CoNi-MPC: Cooperative Non-inertial Frame Based Model Predictive Control
CoNi-MPC: Cooperative Non-inertial Frame Based Model Predictive Control
摘要
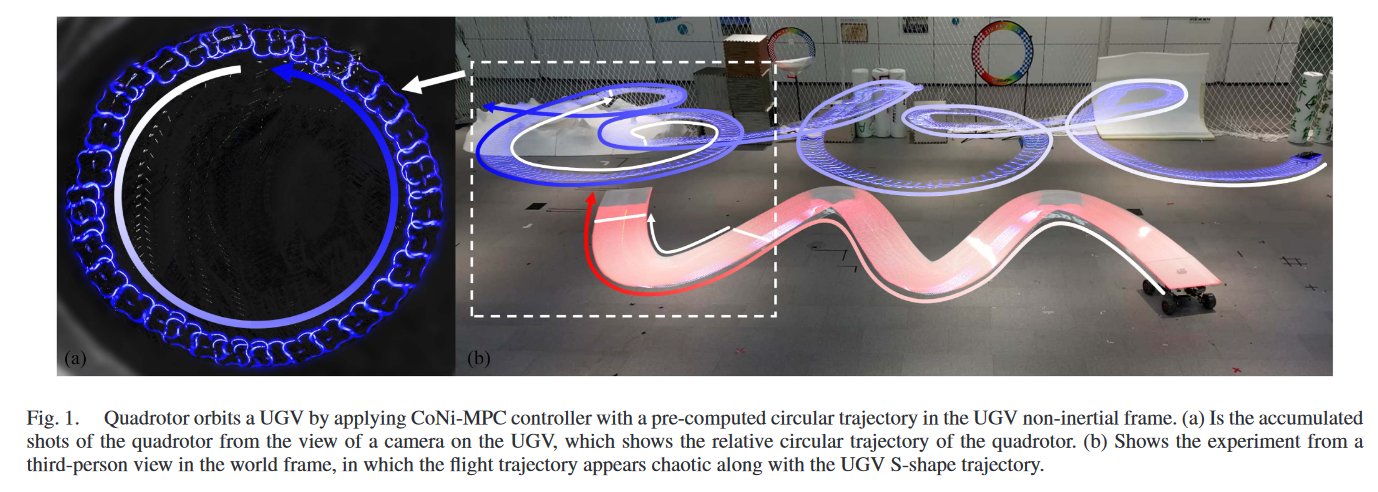
- 提出了多机器人协同的系统,可用于在移动的平台上降落、和目标物保持特定的相对运动等任务
- 直接在目标的坐标系中控制UAV,不对目标的运动做假设
- 在非惯性系(non-inertial frame)中使用NMPC
- 需要目标的相对姿态和速度、角速度以及加速度
- 该框架不需要准确的状态估计、对目标运动模型的先验知识、频繁的重规划
EGO-Planner: An ESDF-Free Gradient-Based Local Planner for Quadrotors
EGO-Planner: An ESDF-free Gradient-based Local Planner for Quadrotors
https://github.com/ZJU-FAST-Lab/ego-planner
摘要
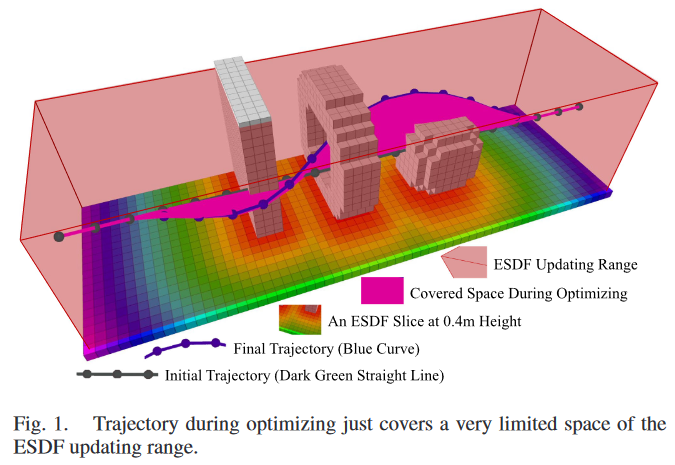
- 欧氏符号距离场(Euclidean Signed Distance Field,ESDF)常用于估计梯度大小和方向
- 轨迹规划只在ESDF很小的子空间进行,更新整个ESDF不必要
- 本文提出ESDF-free的基于梯度的规划框架
- 罚函数的碰撞项基于对比有碰撞的轨迹和无碰撞的引导路径,只有轨迹碰撞新的障碍物时规划器才提取必要的障碍物信息
- 若轨迹是动力学不可行的,则延长轨迹的时间
Rethinking Integration of Prediction and Planning in Deep Learning-Based Automated Driving Systems: A Review
Rethinking Integration of Prediction and Planning in Deep…
自动驾驶中基于深度学习的预测和规划融合方法综述-CSDN博客
摘要
摘要主要有三点信息:
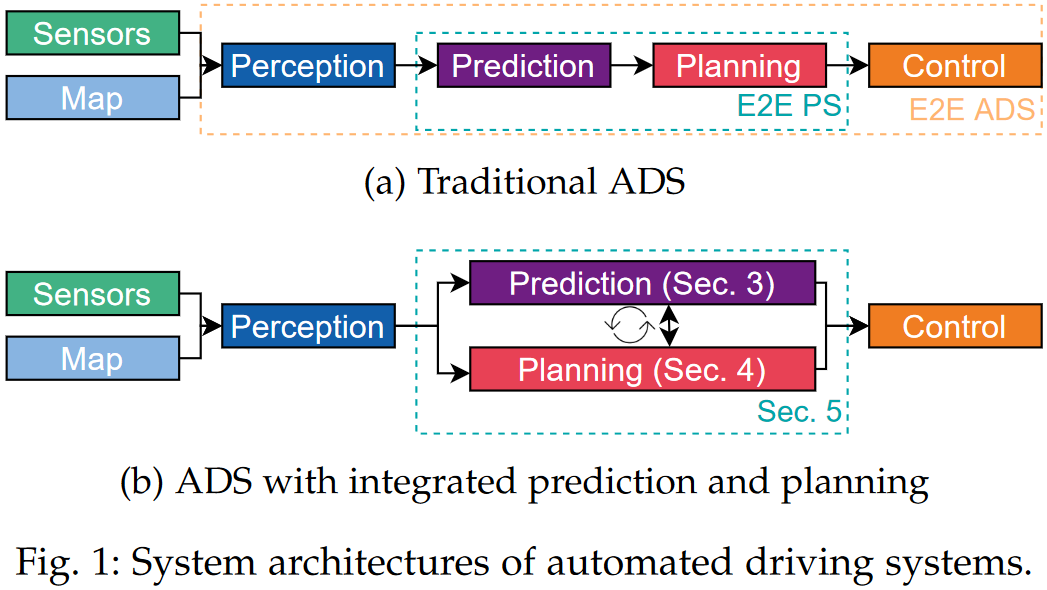
- 模块化的自动驾驶系统常把预测和规划作为连续但单独的任务(sequential separate tasks),这种方式没有考虑交通参与者(traffic participants)对自车行为的反应。
- 近期研究表明,集成预测和规划有助于提升驾驶性能。
- 本文系统性地回顾了最先进的(state-of-the-art,SOTA)基于深度学习(deep learning-based)的预测、规划以及综合预测和规划的模型。
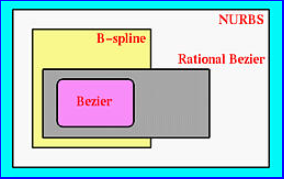
参数曲线
常用的Linux命令介绍:13个基本命令和Shell脚本编程
本文档作为笔记整理的初次尝试
常用的Linux命令介绍:13个基本命令和Shell脚本编程_哔哩哔哩_bilibili
# 文件和目录操作
ls
cd
pwd
# 文本文件的阅读和编辑
cat/tail/head
less/more
nano/vim
# 文件属性
file
where
# 打印
echo
# 例子
Shell programming: variables
Shell programming: for loop